Статья опубликованная в журнале Automation in Construction, том 13, выпуск 1 (январь 2004 г.). Публикуется с небольшими сокращениями.
Берок Хошневис
Профессор Университета Южной Калифорнии
Los Angeles, CA 90089-0193
Хотя автоматизация уже широко используется в производстве, рост автоматизации в строительстве происходит очень медленно. Традиционные методы автоматизации производства, используемые в промышленности, не позволяют строить большие конструкции с необходимыми характеристиками. Этим можно объяснить низкий рост автоматизации процесса строительства. Контурное строительство (Contour Crafting) – это технология послойного возведения, которая имеет большой потенциал как в автоматизации строительства целых сооружении, так и отдельных подкомпонентов. Используя данную технологию можно автоматически построить отдельный дом или ряд домов в один проход, каждый возможно с различной архитектурой, вместе со встроенными в тело конструкции трубопроводами и каналами для инженерных сетей.
ВВЕДЕНИЕ
Начиная с начала 20-го века автоматизация производства постоянно росла и в настоящее время преобладает почти во всех отраслях, за исключением строительства. Внедрение автоматизации в процесс строительства зданий и сооружений осуществлялось медленно ввиду ряда причин: а) неприменимости существующих технологии автоматизации для производства продукции большого размера, б) традиционным методам проектирования, которые не позволяют автоматизировать процесс строительства, в) значительно более низкой доли количества и типов конечной продукции по сравнению с другими отраслями, г) ограничении в материалах, которые можно использовать в системах автоматизации, д) экономической непривлекательности дорогого автоматического оборудования, е) по управленческим причинам. С другой стороны, строительство сталкивается сейчас с серьезными проблемами (Warszawski and Navon, 1998), такими как
- Чрезвычайно низкая производительность труда,
- Очень высокий уровень несчастных случаев,
- Низкое качество выполняемых работ, и
- Контроль на строительной площадке недостаточен и сложен, и становится все меньше квалифицированной рабочей силы.
Автоматизация производства в строительной сфере развивалось приблизительно прошедшие два столетия, но за исключением нескольких успешных попыток (см. например Balaguer и др., 2002), строительство целых сооружении осуществлялось преимущественно ручным трудом. Это потому что различные традиционные методы автоматизации производства не позволяют возводить большие конструкции. В этом плане многообещающими является новая технология послойного наращивания известная как быстрое прототипирование (Rapid Prototyping) или Solid Free Form Fabrication. Хотя несколько методов быстрого прототипирования развиваются на протяжении двух десятилетии (Pegna, 1997) и известно об успешном применении этих методов в ряде отраслей (включая инструментальную промышленность, медицину, производство игрушек и т.д.), большинство методов послойного наращивания ограничены в способности использования материалов, применяемых в строительстве. К тому же, у них ограничена скорость нанесения материалов, которая делает их привлекательными только для изготовления небольших деталей. Контурное строительство (КС) видится единственной технологией послойного наращивания, которая применима для строительства домов (Khoshnevis, 1998).
КОНТУРНОЕ СТРОИТЕЛЬСТВО
Контурное строительство (Contour Crafting) (КС) – это аддитивная технология, в котором используется компьютерное управление для безопалубочного возведения несущих и ограждающих конструкций с ровной и гладкой поверхностью. Важными преимуществами КС по сравнению с другими процессами послойного наращивания являются лучшее качество поверхности конструкции, более высокая скорость возведения и более широкий выбор применяемых материалов.
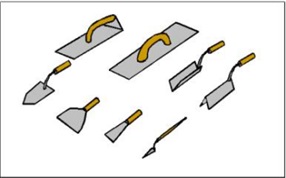
Ключевым элементом КС является использование двух ограничительных пластин, с помощью которых создается ровная и гладкая поверхность объектов. Скульпторы и ремесленники с древних времен использовали простые инструменты, такие как кельмы, шпатели, скульптурные ножи и другие, изображенные на рисунке 1, для придания формы материалу. Универсальность и эффективность этих инструментов засвидетельствовано древними керамическими сосудами и скульптурами с замысловатой и сложной геометрией поверхности и лепниной на стенах помещении. Инструменты для придания формы используются сегодня в промышленном моделировании (например, для создания глиняных моделей автомобилей). Однако, несмотря на прогресс в механизации и автоматизации процессов, эти простые, но мощные инструменты используются пока только в ручном труде, и их использование ограничено созданием моделей и штукатурными работами в строительстве.
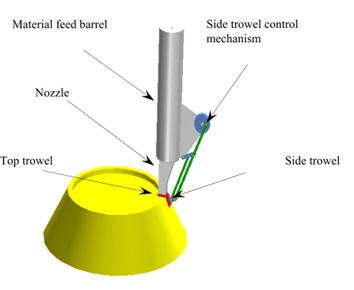
В КС для использования преимуществ таких инструментов в создании поверхностей высокого качества применяется компьютерное управление. Метод послойного возведения позволяет создавать различные формы поверхностей, используя меньше инструментов, чем при ручном труде. Это гибридный метод, который сочетает в себе процесс экструзии для формирования внешней поверхности формы и заливку для формирования сердцевины. Как показано на рисунке 2, экструзионное сопло имеет верхнюю и боковую ограничительную пластину. Благодаря пластинам при выдавливании материала создаются ровные внешняя и верхняя поверхности слоя. Боковая пластина может быть наклонена под некоторым углом для создания наклонных поверхностей. С помощью экструзии создаются только внешние края (оболочка) каждого слоя объекта. После формирования замкнутой секции каждого слоя, если есть в этом необходимость, пространство, заключенное между краями объекта можно заполнить другим материалом, например бетоном.
ПРИМЕНЕНИЕ В СТРОИТЕЛЬСТВЕ
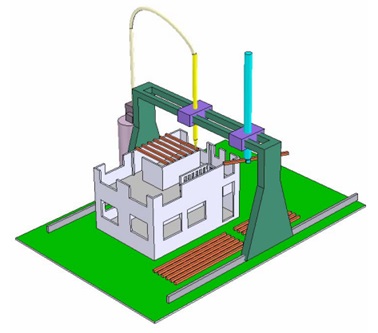
Применение КС в строительстве показано на рисунке 3, где портальная система с установленной на каретке соплом, движется по двум параллельным направляющим на строительной площадке. За один проход по этим направляющим можно построить не только отдельный дом, но и ряд домов, каждый возможно со своей архитектурой и планировкой. Традиционные дома можно построить оборудовав машину для
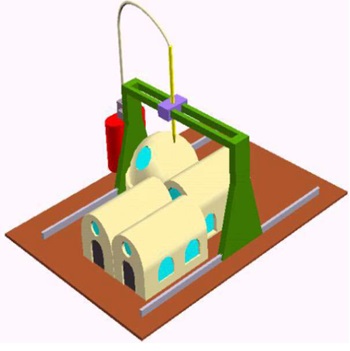
контурного строительства дополнительным манипулятором для монтажа балок перекрытий. Глиняные сооружения, например такие, какие проектирует CalEath (www.calearth.org) и изображенные на рисунке 4, можно строить без использования поддерживающих элементов, используя свойства куполов и сводов. Ниже приведены некоторые интересные аспекты этой концепции автоматизированного строительства:
Гибкость в проектировании. Технология позволяет архитекторам проектировать сооружения со сложной архитектурной геометрией, которую трудно реализовать с помощью существующих традиционных методов строительства.
Возможность использования разных материалов. Для внешних слоев конструкции и для внутреннего заполнителя можно использовать разные материалы. Также можно использовать материалы, вступающие в химическую реакцию друг с другом и которые будут смешиваться при подаче через сопло непосредственно при нанесении. Количество каждого подаваемого материала будет контролироваться компьютером и может зависеть от того какой участок конструкции или сооружения создается. Это сделает возможным строительство сооружений, где на различных участках требуются различные пропорции материалов.
Каналы инженерных систем. Как показано на рисунке 5 каналы для прокладки инженерных сетей могут быть созданы в стенах создаваемых объектов в точности как указано в проектных данных. Образцы стен, выполненные с помощью технологии контурного строительства, как показано на рисунке 8, демонстрируют эту возможность.
Поверхности готовые к покраске. Качество поверхности стен в КС зависит только от поверхности боковых пластин и не зависит от размера отверстия сопла. Следовательно, в КС можно использовать различные заполнители, такие как песок, гравий, армирующая фибра и другие материалы, доступные в данной местности. Вне зависимости от выбора материалов, качество поверхности в КС такое, что не требует какой-либо подготовки перед окончательной отделкой. Система автоматизированной покраски может быть интегрирована с контурным строительством.
Использование инновационных материалов. Поскольку возведение конструкции контролируется компьютером, точное количество нужного материала, такого как smart-бетон, может быть использовано в точно указанном месте. Таким образом, можно добиться, например, чтобы электрическое сопротивление бетона армированного углеродной фиброй в точности соответствовало значению заданного проектом[1].
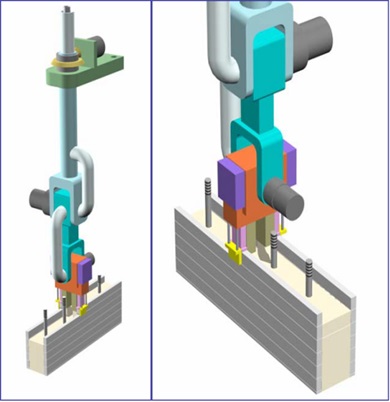
Автоматическое армирование. Для контурного строительства может быть разработана система роботизированного послойного модульного армирования, как показано на рисунке 6. Армирование может осуществляться системой автоматического армирования с помощью трех простых модульных элементов, как показано на рисунке. Для колонн может быть установлен пространственный каркас. Бетон будет заливаться после того как созданы внешние слои, т.е. оболочка стен или колонн. Каркас может повторять геометрию конструкции. Стоить заметить, что системы создания оболочки, армирования и подачи бетона могут быть установлены на одной и той же портальной конструкции.
В качестве альтернативы традиционному металлическому армированию можно использовать другие инновационные материалы, такие как армированный пластик. Поскольку нет необходимости в очень маленьком размере отверстия сопла, через него можно пропускать стекловолоконную или углеродную фибру вместе со связующим материалом (матрицей).
Также можно добиться создания предварительного напряжения методом натяжения на бетон. В процессе возведения в конструкциях могут быть созданы каналы, в которых в последующем будут устанавливаться армирующие элементы из стали или полимерных материалов и производиться их натяжение.
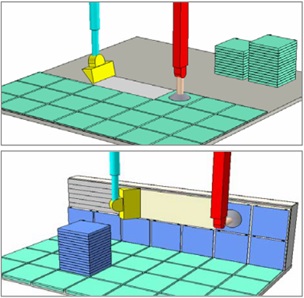
Автоматическая облицовка стен и полов плиткой. Портальная система может быть оборудована манипуляторами для автоматической укладки плитки, как показано на рисунке 7. Один из манипуляторов будет наносить и равномерно распределять клей на стены и полы, другой будет аккуратно укладывать плитку на участки покрытые клеем.
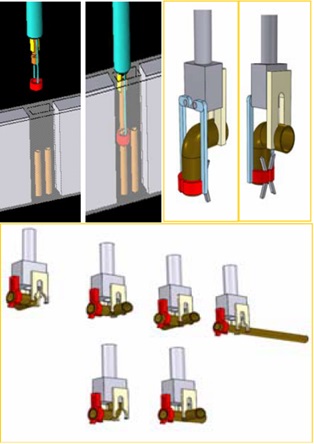
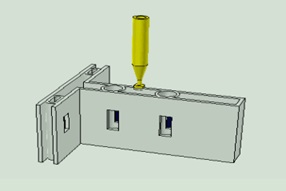
Автоматическая прокладка трубопроводов. Благодаря послойной технологии возведения конструкции, в контурном строительстве есть возможность устройства в стенах каналов для прокладки инженерных сетей. Это делает возможным автоматическую прокладку трубопроводов и электрических сетей. В случае с трубопроводом, после укладки нескольких слоев стен, секция трубы из меди или другого материала соединяется с нижней уже установленной секцией. Роботизированная система, показанная на рисунке 8 вверху слева, соединяет секции трубопровода и, в случае медных труб, имеет нагревательный элемент (показан красным цветом) в форме кольца. На секции труб предварительно нанесен слой припоя, нагревательный элемент нагревает область соединения, припой плавится и происходит соединение труб.
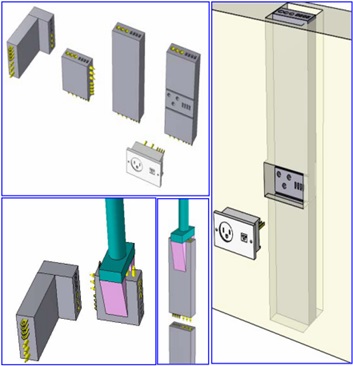
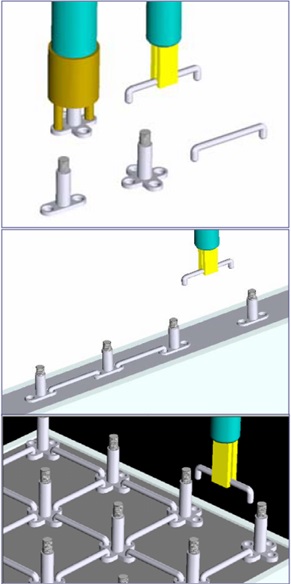
Автоматическая прокладка сетей электричества и связи. Модульный подход, похожий на тот который применяется при изготовлении электрических шин, можно использовать для автоматической прокладки сетей электричества и связи. Модули, показанные на рисунке 9, сделаны из материала-диэлектрика, например полимеров, в которые встроены секции проводников. Манипулятор будет подносить модули к месту установки, и соединять их с уже установленными модулями.
Автоматическая окраска. Во время или после послойного возведения стен, манипулятор, установленный на машине для контурного строительства, может осуществлять окраску стен в соответствии с требуемыми параметрами. Манипулятор для окраски может быть оснащен распылительным соплом или механизмом наподобие печатающей головки струйного принтера (вроде тех которые используются для печати больших рекламных щитов).
ТЕКУЩЕЕ СОСТОЯНИЕ
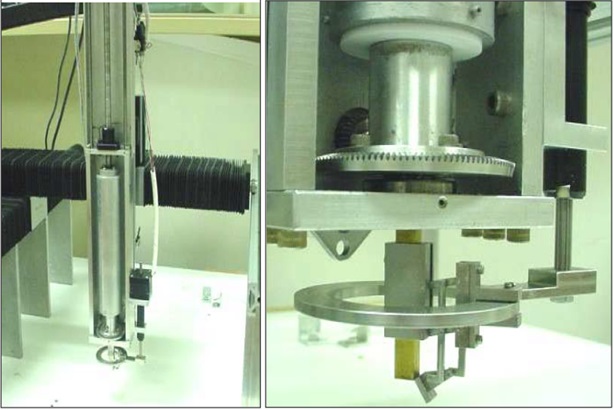
Несколько прототипов машин для контурного строительства были разработаны в Университете Южной Калифорнии для исследований с использованием различных материалов: термопласты, термореактивные пластики и различные виды керамики. Эти машины состоят из портальной системы, соплового узла с контролем трех элементов (экструзии, вращения и наклона ограничительных пластин) и систему контроля движения в шести осях. На рисунке 10 показана машина, созданная для работы с керамическим материалом, Она способна работать с широким диапазоном материалов включая глину и бетон. Материал выдавливается с помощью поршневой системы показанной слева. На рисунке справа показан механизм для вращения сопла и наклона ограничительных пластин.
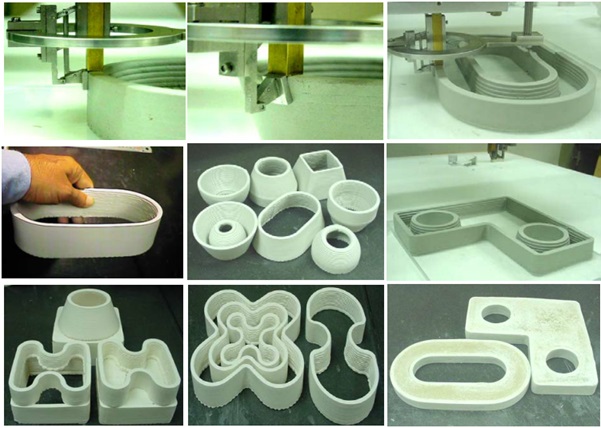
Мы провели обширные эксперименты для оптимизации процесса контурного строительства и получения элементов различной формы: квадратной, выпуклой, вогнутой; некоторые заполнены бетоном, как показано на рисунке 11. О размерах полученных элементов можно судить по руке на рисунке 11.

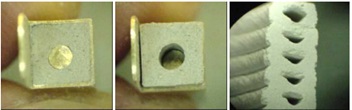
Армирование. Для того чтобы увеличить прочность конструкции, возведенных при контурном строительстве, мы исследовали возможность использования различных видов армирования. Например, на рисунке 12 показаны фотографии из наших экспериментов по использованию проволочной спирали. Благодаря высокому давлению экструзии экструдированный материал плотно обволакивает спирали, не образуя никаких внутренних пустот. Похожие результаты были получены и в экспериментах с другими типами армирования. Таким образом, использование армирования в контурном строительстве видится многообещающим.
Возведение конструкции с пустотами. Через интенсивные эксперименты и серию улучшений в конструкции машины, мы добились возможности возведения конструкций с пустотами, как показано на рисунке 13. Для получения пустот различной формы в сопле могут быть установлены насадки различной формы. Следует заметить, что эти пустоты приводят к возведению более легких конструкции. Также для увеличения прочности можно заполнить эти пустоты материалами на основе эпоксидных смол или различными растворами на основе цемента.
ПЛАН БУДУЩИХ ИССЛЕДОВАНИЙ
В рамках нового гранта от Национального научного фонда (National Science Foundation) мы работаем над разработкой сопловых узлов для возведения полноразмерных строительных конструкции. Разработав новые узлы, мы намерены впервые возвести полноразмерные конструкций, такие как часть стены с встроенными каналами для инженерных сетей или крыши без внутренних поддерживающих конструкции, и выполняем различные расчеты и проводим опыты с использованием широкого диапазона материалов. Проект соплового узла, показанный на рисунке 14, при установке на портальную систему может позиционироваться в шести осях и может одновременно экструдировать раствор, как для внешних слоев конструкции, так и для внутреннего слоя. Узел включает жесткий коаксиальный трубопровод для подведения раствора. Данный узел также согласуется с одновременным автоматическим армированием, которое мы рассматривали выше. С помощью такого узла можно возводить различные криволинейные конструкции спроектированные архитектором.
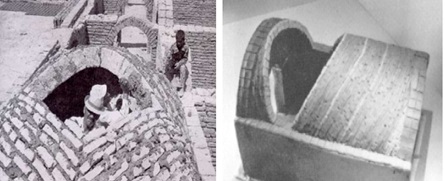
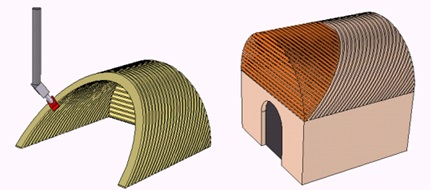
При разработке программного обеспечения для наших машин мы будем применять знания, которые использовались еще в древности и которые сейчас успешно применяются CalEarth (см. www.calearth.org) при строительстве сводчатых конструкции. Пример подобного древнего метода строительства куполов и сводов показан на рисунке 15. На рисунке 16 схематически изображен пример послойного возведения таких конструкций с помощью машины для контурного строительства, вдохновленный древними методами строительства. Мы будем аналитически оценивать характеристики различных рисунков нанесения слоев, чтобы выявить оптимальные варианты.
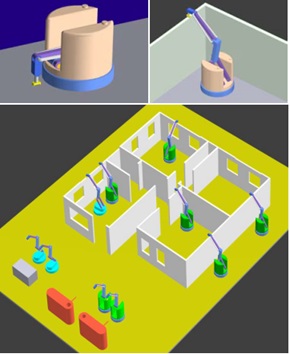
Альтернативный вариант. Для процессов, изображенных на рисунках 3 и 4, требуется роботизированная система, которая должна быть достаточно больших размеров, чтобы построить целый дом в пределах своей рабочей зоны. Такой подход имеет свои плюсы, но он требует большого объема подготовительных работ и крупноразмерных конструкции для роботизированной системы. Подход, при котором используются скоординированные действия множества мобильных роботов, выглядит предпочтительнее.
Подобный подход, изображенный на рисунке 17, имеет несколько преимуществ включая легкость транспортировки и установки, возможность параллельного строительства, когда несколько роботов работают на разных участках возводимой конструкции, возможность регулирования количества используемого для строительства оборудования.
Строительный робот может быть оборудован специальной емкостью или соединен подводками с насосом для нагнетания экструдируемого материала. Концевой эффектор (end effector) робота будет снабжен соплом, которое будет достигать всего диапазона высот от уровня стоянки до требуемой высоты возводимой конструкции. В случае применения мобильных роботов с манипуляторами из жестких звеньев, может отпасть необходимость в датчике положения в концевом эффекторе. Вместо него можно использовать т.н. лазерный трекер, который будет устанавливаться в определенном месте, а отражатели будут установлены на каждом мобильном роботе. В случае такой конфигурации робот не будет выполнять строительные работы во время передвижения. Достигнув определенной точки, которую мы называем mobile platform post, робот фиксирует себя в этой точке с помощью специальных устройств. Затем он продолжает выполнение работы, которую он прервал в предыдущей опорной точке. Подобная схема часто используется в промышленности, например при сварке больших конструкций с помощью сварочного робота в судостроении.
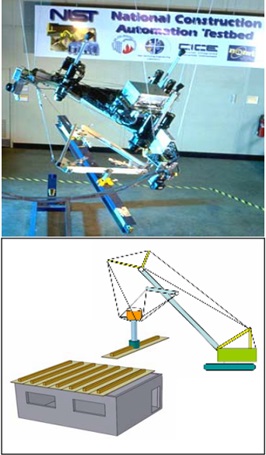
Покрытия могут быть с балками так и без балок. Безбалочные покрытия, такие как купола и своды могут быть построены мобильными роботами. Плоские покрытия могут быть балочной конструкции. К каждой балке снизу может быть прикреплена тонкая плита. Балки могут устанавливаться двумя роботами, работающими совместно, каждый из которых будет располагаться на противоположных сторонах перекрываемого помещения или здания. Альтернативой подобному подходу может быть использование РобоКрана, разработанного Национальным институтом стандартов и технологий (NIST), который может быть установлен на платформу традиционного крана как показано на рисунке 18 снизу (на верхнем рисунке показано как РобоКран перемещает стальную балку). Кроме захвата для балок РобоКран может быть оборудован емкостью для материала покрытия и специальным сопловым узлом для заливки покрытия.
Исследование информационных технологий. На рисунке 19 изображены IT-компоненты наших будущих исследований направленных на применение мобильной робототехники в контурном строительстве. Схема изображает систему планирования, на выходе из которого мы должны получить виртуальную систему (в виде компьютерной симуляции и анимации) и в конечном итоге реальную систему, как только появится необходимое аппаратное обеспечение (оборудование). При подключении к системе аппаратного обеспечения предлагаемая система планирования получит обратную связь на стадии внедрения. Ниже приведено краткое описание компонентов, изображенных на рисунке 19.
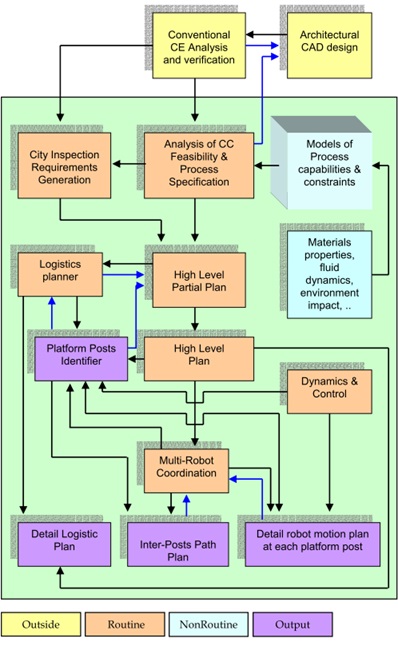
Анализ возможности (Analysis of CC Feasibility). После всех возможных уточнений проводится анализ возможности производства с помощью технологии КС. Этот процесс проводится с помощь различных инженерных моделей и программного обеспечения. Например, для проверки возможности построения определенной части изогнутой крыши, могут быть использованы модели из гидродинамики и материаловедения, чтобы обеспечить возможность применения определенных материалов и определить их технические характеристики, а также технологические параметры процесса. Проектные требования и технологические параметры затем передаются в систему планирования. Характеристики несовместимые с КС сообщаются архитектору.
Соответствие строительным нормам (City Inspection requirements generation). Проектные данные проверятся на соответствие местным строительным нормам, и разрабатывается схема контроля над строительством с различными видами контроля на различных этапах строительства. Требования по контролю интегрируются с другими строительными требованиями и передаются в систему планирования. В связи с тем, что местные строительные нормы подвержены изменениям, усилия по разработке данного модуля будут минимальными в предлагаемом исследовании.
План строительных процессов (High level partial plan). Это представление последовательности возможных укрупненных процессов в строительстве. Централизованная система планирования может генерировать план как на все процессы вкупе, так и на часть процессов по требованию. План включает альтернативные последовательности процессов, на случай если при детальном планировании возникнут логистические конфликты или нежелательный график работ.
Детальный план строительных процессов (High level plan). План генерируется центральным модулем планирования и включает такие элементы как ведомость опорных точек (platformposts) (точек на которых роботы фиксируются для выполнения операции в пределах своей рабочей зоны) для различных этапов строительства, без конкретного распределения роботов по опорным точкам. Этот детальный план, который определяет что должно быть сделано на каждой опорной точке, также передается модулю управления роботами (Multiple Robot Coordination module).
Модуль управления роботами (Multiple Robot Coordination module). Этот модуль производит децентрализованное распределение задач между имеющимися в наличии роботами на основе различных факторов, таких как степень пригодности робота для выполнения задачи (например, робот снабженный захватным устройством для сборки водопровода, является менее подходящим для работ по электричеству, т.к. для этого нужно сменить захватное устройство), близость к опорной точке выполнения задачи, количество бетонной смеси оставшейся в емкости робота, количества оставшегося электрического заряда и др. Модуль может изменить распределение задач по ходу строительства в случае возникновения непредвиденных событий (например, поломки робота).
Логистический планировщик (Logistics Planner). Данным модулем, который работает совместно с модулем идентификации опорных точек (Platform Post Identifier) и в соответствии с операционным графиком на каждой опорной точке, генерируется подробная информация о расположении ресурсов (основных бункеров для бетона, элементов армирования, модульных элементов для прокладки трубопроводов и электропроводки, краски, точек зарядки аккумуляторов), а также возможные схемы паллетирования, диспетчерский график и график поставки материалов.
Динамика и контроль. (Dynamics and Control). Этот модуль отвечает за фактическое выполнение задач и обеспечение успешной производительности. Модуль использует моделирование динамики роботов и разрабатывает схемы контроля, которые включают цели, выходящие за рамки простого выполнения задания. Они включают: определение наилучшего расположения опорной точки для потребления минимального количества энергии, координация систем доставки материалов и перемещения роботов к месту производства работ, диапазоны необходимых замедлений и ускорений выполнения работ и т.д.
ЗАКЛЮЧЕНИЕ
Благодаря своей скорости и возможности использования местных материалов, контурное строительство имеет потенциал для применения в строительстве дешевого жилья и жилья для пострадавших от стихийных бедствий. Строительство элитных зданий с нестандартной архитектурой и сложной геометрией, строительство которых обходится очень дорого при ручном труде, является еще одним из возможных применении КС. Следует также отметить низкое воздействие на окружающую среду. Согласно различным статистическим данным строительная отрасль производит значительное количество вредных выбросов и огромное количество твердых отходов. В результате строительства стандартного дома на одну семью появляется от 3 до 7 тонн отходов (City of Austin, 2002). Что касается потребления, то более 40% используемых в мире сырьевых ресурсов потребляется в строительной индустрии (Lenssen and Roodman, 1995). Машины для контурного строительства могут быть полностью на электрической тяге и, следовательно, не производить выбросов в атмосферу. Благодаря очень точной технологии послойного возведения, отходы материалов при контурном строительстве будут ничтожно малы. Методом КС можно завершить строительство целого дома в считанные часы (например, 2 этажное здание общей площадью в 200 м2 может быть построено менее чем за 2 дня) вместо нескольких месяцев как это обычно практикуется. Высокая скорость приведет к эффективности строительной логистики и менеджмента и, следовательно, благоприятно скажется на транспортной системе и окружающей среде.
Еще очень много исследовательских задач предстоит решить для того чтобы довести технологию контурного строительства до коммерческого использования. Исследования, описанные в данной статье, являются первыми шагами на пути к полномасштабному внедрению контурного строительства в реальное производство. Читатели могут получить обновленную информацию об исследованиях и посмотреть видеоклипы и анимацию на веб-сайте автора: www-rcf.usc.edu/~khoshnev.
БЛАГОДАРНОСТЬ
Данный материал основан на работе, выполненной благодаря грантам Национального научного фонда (National Science Foundation) № 9522982, 9615690 и 0230398, а также гранту Office of Naval Research.
ЛИТЕРАТУРА
C. Balaguer, M. Abderrahim, S. Boudjabeur, P. Aromaa, K. Kahkonen, S. Slavenburg, D. Seward, T. Bock, R. Wing, & B. Atkin, FutureHome: An Integrated Construction Automation Approach, IEEE Robotics & Automation Magazine (2002) 55-66.
City of Austin Green Building Program (2002). www.ci.austin.tx.us/greenbuilder/
B. Khoshnevis and G. Bekey, “Automated Construction using Contour Crafting – Applications on Earth and Beyond,” Proceedings of the 19 th International Symposium on Automation and Robotics in Construction, Gaithersburg, Maryland (2002) 489-494.
B. Khoshnevis, nnovative rapid prototyping process makes large sized, smooth surfaced complex shapes in a wide variety of materials, Materials Technology, 13:2 (1998) 52-63.
B. Khoshnevis, R. Russell, H. Kwon, & S. Bukkapatnam, Contour Crafting – A Layered Fabrication Technique, Special Issue of IEEE Robotics and Automation Magazine, 8:3 (2001-a) 33-42.
B. Khoshnevis, S. Bukkapatnam, H. Kwon, H., & J. Saito, Experimental Investigation of Contour Crafting using Ceramics Materials, Rapid Prototyping J., 7:1 (2001-b) 32-41.
H. Kwon, S.. Bukkapatnam, B. Khoshnevis, & J. Saito, Effect of orifice geometry on surface quality in contour crafting, Rapid Prototyping Journal, 8:3 (2002) 147-160.
H. Kown, “Experimentaion and Analysis of Contour Crafting Process using Ceramic Materials,” Unpublished PhD dissertation, University of Southern California, 2002 (may be downloaded at: www-rcf.usc.edu/~khoshnev/RP/RP-Top-Page.htm).
J. Lenssen & C. Roodman, Worldwatch Paper 124: A Building Revolution — How Ecology and Health Concerns are Transforming Construction, Worldwatch Institute, Washington, D.C. (1995).
J. Pegna, Explorary investigation of solid freeform construction, Automation in construction, 5:5 (1997) 427-437.
D. Shrunk, B, Sharpe, C. Cooper, & M. Thangavelu, The Moon: Resources, Future Developments, and Colonization, (Wiley-Praxis Series in Space Science and Tech., NY., 1999).
A. Warszawski, & R. Navon, Implementation of robotics in buildings: current status and future prospects, Journal of Construction Engineering and Management, Vol. 124, No.1(1998) 31-41.
G. Zak, M. Sela,, C. Park & B. Benhabib, Layered-Manufacturing of Fiber-Reinforced Composites, Journal of Manufacturing Science and Engineering, ASME, Vol.121 (1999) 448-455.
[1] Речь идет о свойстве бетона с углеродной фиброй менять свои электрические свойства в результате деформации или повреждения. Данное свойство можно использовать для мониторинга состояния конструкции.
Перевод Smeta-kz.com.
Оригинал статьи contourcrafting.org